※ 本文轉寄自 ptt.cc 更新時間: 2021-11-16 16:13:30
看板 car
作者 標題 Re: [討論] ACC撞防撞車是不是設計太智障
時間 Tue Nov 16 08:58:45 2021
※ 引述《rfvujm (Rfvujm)》之銘言:
: 今天看新聞啦
: 又看到三寶開ACC撞防撞車
: ACC沒考慮前車突然急煞或失去動力的情況嗎
: 前方遠遠有不動的物體就這樣直直給他撞下去?
其實感測器感測距離比人眼還遠,問題在感知上(確認前方是否有車)
自駕技術分
1. Sensing(感測)
2. Perception(感知)
3. Planning(規劃)
4. Control(控制)
最難的一直都是感知
感測到前方有物體是一回事,再進一步確認前方物體是一輛車又是一回事
目前市售車主要配置毫米波雷達+視覺辨識(輔助)
1. 雷達並不是偵測不到靜止物
但為了避免誤作動,選擇只輸出移動物體量測
2. 攝影機會有少數例子無法感知的情況(斜著的貨車、翻覆的貨車等)
3. ACC屬於ADAS(Advanced Driver Assistance Systems)只是輔助駕駛
遇到靜止物體沒反應比誤作動突然煞車影響小的多
[雷達]
https://i.imgur.com/AInOO4D.jpg
![[圖]](https://i4.disp.cc/imgur/AInOO4D.png)
(2) 量測物理量:距離、角度、相對速度,但不包含高度資訊
nuScenes數據庫
https://i.imgur.com/7PlilVO.jpg
![[圖]](https://i4.disp.cc/imgur/7PlilVOh.png)
黃色的點是車用雷達的數據
https://i.imgur.com/s1BEZDB.jpg
![[圖]](https://i4.disp.cc/imgur/s1BEZDB.png)
無法確定雷達感測到的是前車、人孔蓋、橋墩、懸掛的號誌或看板
避免錯誤偵測造成急煞,只輸出可動的物體量測
為了解決感測靜止物體造成誤作動的問題
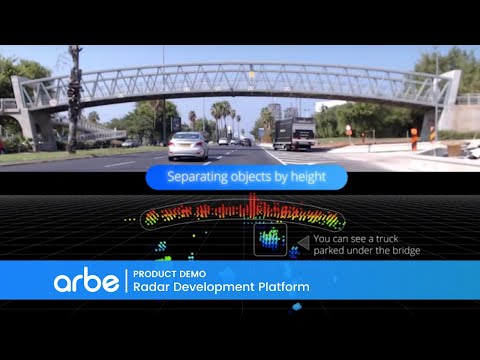
一些廠商有在開發4D Imaging Radar
https://i.imgur.com/O5TxpCd.jpg
![[圖]](https://i4.disp.cc/imgur/O5TxpCd.png)
Arbe: Radar Revolution. Delivered
https://www.youtube.com/watch?v=Yc4MfzbbtuI
The RadSee 4D Imaging Radar
https://www.youtube.com/watch?v=h7t-6_wiZKM

[視覺]
視覺是根據演算法得到"距離"的資訊
但要開發一套100%正確的演算法太強人所難
相較於"直接量測"到物理量
演算法"計算"得到物理量
會讓軟體複雜度增加,這對系統強健性而言不是啥好事
當然以上討論的都還停留在輔助駕駛階段
Intel副總裁兼Mobileye總裁/首席執行官在CES演講中提過
The RadSee 4D Imaging Radar
https://www.youtube.com/watch?v=h7t-6_wiZKM
[視覺]
視覺是根據演算法得到"距離"的資訊
但要開發一套100%正確的演算法太強人所難
相較於"直接量測"到物理量
演算法"計算"得到物理量
會讓軟體複雜度增加,這對系統強健性而言不是啥好事
當然以上討論的都還停留在輔助駕駛階段
Intel副總裁兼Mobileye總裁/首席執行官在CES演講中提過
https://i.imgur.com/AVwH4KT.jpg
![[圖]](https://i4.disp.cc/imgur/AVwH4KTh.png)
ADAS和自駕差異不在於能力
而是平均失效間隔時間(MTBF, Mean Time Between Failures)
也就是當ADAS往自駕邁進時
除了要滿足功能外,更重要的是確保足夠可靠(極低失效跳脫機率)
關於這點,美國密西根大學M-City自動駕駛實驗室的彭暉提過
https://i.imgur.com/c4vJW1n.jpg
![[圖]](https://i4.disp.cc/imgur/c4vJW1n.png)
訂定ODD(Operational Design Domain)
Lv4自駕在ODD運作,確保系統安全,是比較負責人的作法
ODD會受當地交通環境複雜度影響
例如:
1. 交通號誌(不同位置、被招牌擋住之類)
2. 車道寬度、車道線清晰程度
3. 用路人習慣、駕駛習慣
需要因地制宜,適合A區域的ODD不能直接套用到B區域
所以如何制定合理的ODD
成為目前自駕車發展討論相當熱烈的議題&難題
補充一下光達
傳統光達(AM lidar)量測到的三維點雲,但不包含速度資訊
速度必須經由不同時間點的數據進行推算
(點雲分類、時間軸前後關聯、過濾雜訊,進而推算該物體速度)
https://i.imgur.com/i3DSwxa.jpg
![[圖]](https://i4.disp.cc/imgur/i3DSwxah.png)
所以目前有發展FCMW(frequency modulated continuous wave)光達
可以直接量測速度
但光達依舊有些感測問題
1. 鏡像、玻璃材質測不到(光穿透)
2. 黑色物體偵測距離偏短(吸收能量)
3. 惡劣天候感測能力不佳,甚至前車水花、海邊風砂干擾的問題
光達、雷達、攝影機三者互補
會是"安全"且最全面的作法
--
※ 發信站: 批踢踢實業坊(ptt.cc), 來自: 60.251.209.37 (臺灣)
※ 文章代碼(AID): #1Xam982N (car)
※ 文章網址: https://www.ptt.cc/bbs/car/M.1637024328.A.097.html
推 : 推專業1F 11/16 09:02
推 : 人類辨識能力真的挺行的對吧2F 11/16 09:03
→ : 你的大腦在開車上路之前至少訓練了10幾年,ai才上3F 11/16 09:06
→ : 路幾年?
→ : 路幾年?
推 : 專業推~5F 11/16 09:08
推 : 專業推6F 11/16 09:11
噓 : 學飛機不會膩 在螃蟹車後面放應答器 很難嗎7F 11/16 09:11
推 : 無關訓練時間,只說能力很強不行嗎?8F 11/16 09:11
推 : AI有夠廢吹牛也十多年了 還是這副鳥樣9F 11/16 09:12
→ : AI果然只是騙投資人的騙局
AI絕對有用,但是並非萬解→ : AI果然只是騙投資人的騙局
不能啥都丟給演算法處理
推 : 不能說 AI爛 AI到ACC中間很多因子 你車上要裝多少11F 11/16 09:22
推 : 推專業12F 11/16 09:22
→ : 錢的電腦 還有感測器? ACC是大眾商品13F 11/16 09:22
→ : 只是要影像識別 計算精準都很容易 要快速便宜很難
→ : 更別說還要跟車上一堆控制通訊 會有很多問題要解
→ : 軟體上跑AI是一回事 燒到FW又是一回事 簡化再簡化
→ : 只是要影像識別 計算精準都很容易 要快速便宜很難
→ : 更別說還要跟車上一堆控制通訊 會有很多問題要解
→ : 軟體上跑AI是一回事 燒到FW又是一回事 簡化再簡化
推 : 我覺得不能說AI廢 是騙投資人的人把他吹17F 11/16 09:39
→ : 上天 只講它能做到什麼 不講它做不到什
→ : 麼
→ : 上天 只講它能做到什麼 不講它做不到什
→ : 麼
推 : 錢大好神20F 11/16 09:47
推 : 推21F 11/16 10:23
→ : 雷達干擾一堆,一般對空都要有個五度角,避開地面的22F 11/16 10:38
→ : 雜訊!更不要說雨這種會吸微波的
→ : 雜訊!更不要說雨這種會吸微波的
→ : 建議你去研究Tesla AI day的內容24F 11/16 10:48
推 : 推 言之有物25F 11/16 10:48
推 : 專業推推26F 11/16 10:48
→ : 現在的技術就像一個人在不熟的路上開車 只能看標線27F 11/16 10:54
→ : 、燈號來做反應
→ : 而人類開車會結合過去的駕駛經驗 預測接下來可能會
→ : 發生的事提前做反應
→ : 、燈號來做反應
→ : 而人類開車會結合過去的駕駛經驗 預測接下來可能會
→ : 發生的事提前做反應
推 : 推31F 11/16 11:02
推 : 謝謝你認真回垃圾廢文32F 11/16 11:04
推 : 專業推33F 11/16 11:45
推 :34F 11/16 11:47
推 : 防撞車上個QR code讓電腦辨識就好辣35F 11/16 11:57
推 : 請問如果是怕誤判煞停 為什麼不做提醒而不煞車呢?36F 11/16 12:00
藍色lidar、白色radar
https://i.imgur.com/nPmeMdl.jpg
![[圖]](https://i4.disp.cc/imgur/nPmeMdl.png)
靜止的反射干擾訊號太多啦
天橋、大樓、人孔蓋、號誌、停車場出口閘門、減速丘.....一堆有的沒的
系統會一直提醒,光想像就很痛苦
→ : 前面有一陣煙也可以提醒 不一定要煞停37F 11/16 12:01
→ : 原來雷達有這麼多限制 難怪特斯拉要用攝影頭38F 11/16 12:18
推 : 推39F 11/16 12:18
→ : 感覺辨識數據和技術提升到一定程度能克服40F 11/16 12:19
演算法不能100%解決問題所以才有新型態4D雷達(解決靜止物感知)、FMCW光達(直接輸出速度而非計算)
推 : 反推三寶...是不是腦袋不太會用?41F 11/16 12:33
推 : 推 之前看過很多反射導致無法被偵測到的案件42F 11/16 12:41
→ : AI想更聰明 先裝張3080在車上吧 -.-43F 11/16 12:52
→ : 那種便宜貨還想多聰明
→ : 那種便宜貨還想多聰明
推 : 影像的solution就是吃pixel數、紋理特徵,pixel不45F 11/16 12:53
→ : 夠多、前處理不好就不精確,要做好就花時間,同一
→ : 個model結構,input的影像大張效果就好。
推 : 光達、雷達,同樣效果計算成本相對少,但沒有紋理
→ : 資訊無法判別是否為可能導致衝突的物件。
推 : 所以高速用光達,但靜止物被過濾。AEB可判斷靜止物
→ : 是否會導致衝突,但算太慢,免強可用最快約為時速80
→ : ,這就是目前技術瓶頸。
→ : 夠多、前處理不好就不精確,要做好就花時間,同一
→ : 個model結構,input的影像大張效果就好。
推 : 光達、雷達,同樣效果計算成本相對少,但沒有紋理
→ : 資訊無法判別是否為可能導致衝突的物件。
推 : 所以高速用光達,但靜止物被過濾。AEB可判斷靜止物
→ : 是否會導致衝突,但算太慢,免強可用最快約為時速80
→ : ,這就是目前技術瓶頸。
推 : 解決方法不難其實53F 11/16 13:01
單純滿足功能當然很簡單要做到相當穩定可靠的程度談何容易
※ 編輯: chandler0227 (60.251.209.37 臺灣), 11/16/2021 13:19:17
推 : 那會整路叫到你不要不要的,最後關掉54F 11/16 13:36
推 : 推錢大55F 11/16 14:39
推 : 好專業,請問防撞車上做一個ACC的辨識性統可行嗎?56F 11/16 15:46
→ : 例如安裝一個發射訊號的儀器
→ : 例如安裝一個發射訊號的儀器
--
※ 看板: Car 文章推薦值: 0 目前人氣: 0 累積人氣: 89
作者 chandler0227 的最新發文:
![]() EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL – AEB Car-to-Car systems 節錄關於Global …116F 44推 2噓
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL – AEB Car-to-Car systems 節錄關於Global …116F 44推 2噓![]() 不要不懂裝懂亂講 moose test是依據ISO 3888 ISO 3888-1:2018 Passenger cars — Test track for a severe lane-change …89F 45推 2噓
不要不懂裝懂亂講 moose test是依據ISO 3888 ISO 3888-1:2018 Passenger cars — Test track for a severe lane-change …89F 45推 2噓- 2023年8月 中華董事會通過購買桃園市楊梅區土地案,計18.10億元 桃園市楊梅區新秀段61地號等22筆土地及梅園段132地號等6筆土地,共28筆土地。 2024年7月 中華汽車產業園區開發計畫案 …110F 28推 7噓
![]() 來講講影片鬼扯的地方 這位置應該是吸能盒了 吸能盒做很厚難道其他結構處變形比較好? 看個前後橫樑就能知道不注重安全性? 那全世界的NCAP是不是都該收一收了 用前防撞樑寬度跟車寬的比例來當防護率? …254F 107推 15噓
來講講影片鬼扯的地方 這位置應該是吸能盒了 吸能盒做很厚難道其他結構處變形比較好? 看個前後橫樑就能知道不注重安全性? 那全世界的NCAP是不是都該收一收了 用前防撞樑寬度跟車寬的比例來當防護率? …254F 107推 15噓![]() 總覺得雖然昨天TNCAP有提供新聞稿 但媒體還是寫的很不精準,或是沒get到點 "特斯拉也即將在2025年送測第2款電動車" 昨天在交流會上已經再三強調: 測試都是由消基會去市場擔 …78F 31推
總覺得雖然昨天TNCAP有提供新聞稿 但媒體還是寫的很不精準,或是沒get到點 "特斯拉也即將在2025年送測第2款電動車" 昨天在交流會上已經再三強調: 測試都是由消基會去市場擔 …78F 31推




點此顯示更多發文記錄
回列表(←)
分享